How does a robot arm index its motion?
MisPORTRAITS.
MisPortraits is a series of robotic experiments in drawing, paint brushing to convert iconic portraits into tangible artifacts. The process is built on a rigorous translation of grayscale values into rotation angles, and it embraces the motion specific “accidents” of the six-axis robot arms.
focus: image recognition, fidelity
team: Matthew Tam, Pablo Osorio, Francisco Moure,
Salvador Corte, Talin Ebrahimi, Viola Ago, Anass Benhachmi
program: robotic fabrication
date: 2011 fall Atwood and 2012 spring Weiser seminar
Sci-Arc, Los Angeles
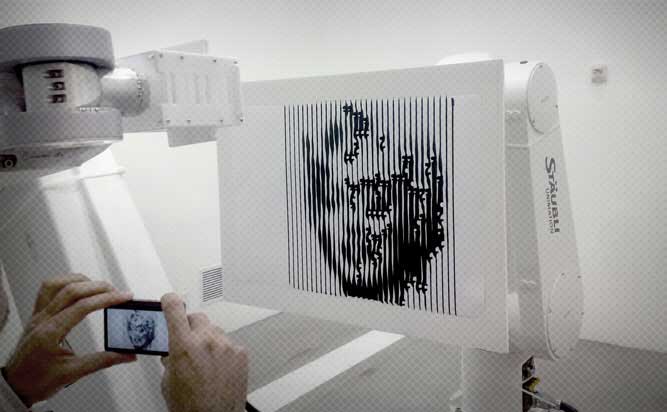
SINGULARITY AND JOINT MAXIMIZATION Experimentation on the levels of accidentality with six-axis robot arms drawing felt pen graphics. The gradient value of the
image translates into the rotation values of a flat-nose pen. The image is ‘resolution’ 33 by 33 pixel.


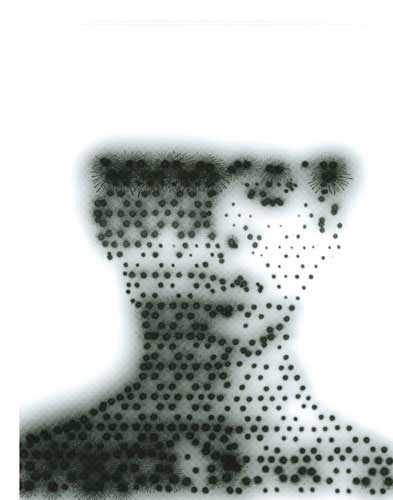
AIRBRUSHING In this robotic airbrush experiment the blurriness of the images is
controlled by the distance of the tool-tip from the canvas. Our team focused on the
abstraction of a single portrait, the boundary conditions of face recognition and a
series of experiments in robotic control and image fragmentation.